Euklidischer Algorithmus
Der euklidische Algorithmus ist ein Algorithmus aus dem mathematischen Teilgebiet der Zahlentheorie. Mit ihm lässt sich der größte gemeinsame Teiler zweier natürlicher Zahlen berechnen. Das Verfahren ist nach dem griechischen Mathematiker Euklid benannt, der es in seinem Werk „Die Elemente“ beschrieben hat.
Der größte gemeinsame Teiler zweier Zahlen kann auch aus ihren Primfaktorzerlegungen ermittelt werden. Ist aber von keiner der beiden Zahlen die Primfaktorzerlegung bekannt, so ist der euklidische Algorithmus das schnellste Verfahren zur Berechnung des größten gemeinsamen Teilers.
Der euklidische Algorithmus lässt sich nicht nur auf natürliche Zahlen anwenden. Vielmehr kann damit der größte gemeinsame Teiler von zwei Elementen eines jeden euklidischen Rings berechnet werden. Dazu zählen beispielsweise Polynome über einem Körper.
Der klassische Algorithmus
„Wenn CD aber AB nicht misst, und man nimmt bei AB, CD abwechselnd immer
das kleinere vom größeren weg, dann muss (schließlich) eine Zahl übrig
bleiben, die die vorangehende misst.“
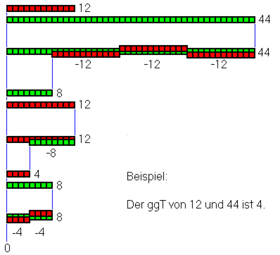
Euklid berechnete den größten gemeinsamen Teiler, indem er nach einem gemeinsamen „Maß“ für die Längen zweier Linien suchte. Dazu zog er wiederholt die kleinere der beiden Längen von der größeren ab. Dabei nutzt er aus, dass sich der größte gemeinsame Teiler zweier Zahlen (oder Längen) nicht ändert, wenn man die kleinere von der größeren abzieht.
Ist die Differenz von  und
und  sehr groß, sind unter Umständen viele Subtraktionsschritte notwendig. Hippasos von
Metapont benutzte schon vor Euklid diese so genannte Wechselwegnahme
geometrisch für den Beweis
der Inkommensurabilität bei gewissen regelmäßigen n-Ecken: Im Quadrat oder
im regelmäßigen Fünfeck etwa gibt es keinen gemeinsamen Teiler (Maß) einer Seite
mit der Diagonalen.
sehr groß, sind unter Umständen viele Subtraktionsschritte notwendig. Hippasos von
Metapont benutzte schon vor Euklid diese so genannte Wechselwegnahme
geometrisch für den Beweis
der Inkommensurabilität bei gewissen regelmäßigen n-Ecken: Im Quadrat oder
im regelmäßigen Fünfeck etwa gibt es keinen gemeinsamen Teiler (Maß) einer Seite
mit der Diagonalen.
Heutzutage wird in der Regel der weiter unten beschriebene
Divisions-Algorithmus verwendet, bei dem die Schritte 2 und 3 dadurch ersetzt
werden, dass man, an Stelle der Differenz von  und
und  ,
für
,
für  den Rest
bei der Division von
durch
nimmt. Ein weiterer Vorteil dieser Variante ist, dass man sie auf beliebige
euklidische Ringe (zum Beispiel Polynomringe
über einem Körper)
übertragen kann, in denen der klassische Algorithmus nicht funktioniert.
den Rest
bei der Division von
durch
nimmt. Ein weiterer Vorteil dieser Variante ist, dass man sie auf beliebige
euklidische Ringe (zum Beispiel Polynomringe
über einem Körper)
übertragen kann, in denen der klassische Algorithmus nicht funktioniert.
Beschreibung durch Pseudocode
Der klassische Algorithmus hier in Pseudocode für nichtnegative ganze Zahlen a und b dargestellt:
EUCLID_OLD(a,b) 1 wenn a = 0 dann 3 Ergebnis = b 4 sonst 5 solange b ≠ 0 6 wenn a > b dann 8 aa – b 9 sonst 10 b
Dieser Algorithmus kann auch in einer rekursiven Version angegeben werden:
EUCLID_OLD_RECURSIVE(a,b) 1 wenn b = 0 dann 2 Ergebnis = a 3 sonst 4 wenn a = 0 dann 5 Ergebnis = b 6 sonst 7 wenn a > b dann 8 Ergebnis = EUCLID_OLD_RECURSIVE(a – b, b) 9 sonst 10 Ergebnis = EUCLID_OLD_RECURSIVE(a, b – a) 11 // 12 // 13 //
Moderner euklidischer Algorithmus
Heutzutage ersetzt man die im klassischen Algorithmus auftretenden
wiederholten Subtraktionen eines Wertes jeweils durch eine einzige Division mit Rest.
Der moderne euklidische Algorithmus führt nun in jedem Schritt solch eine
Division mit Rest aus. Er beginnt mit den beiden Zahlen
und  ,
deren größter gemeinsamer Teiler bestimmt werden soll.
,
deren größter gemeinsamer Teiler bestimmt werden soll.

In jedem weiteren Schritt wird mit dem Divisor und dem Rest des vorhergehenden Schritts eine erneute Division mit Rest durchgeführt, und zwar so lange, bis eine Division aufgeht, das heißt, der Rest Null ist.



Der Divisor  der letzten Division ist dann der größte gemeinsame Teiler.
der letzten Division ist dann der größte gemeinsame Teiler.
Da sich die Zahlen in jedem zweiten Schritt mindestens halbieren, ist das Verfahren auch bei großen Zahlen extrem schnell.
Beispiel

ggT(1071, 462) = 21.
Der größte gemeinsame Teiler von  und
und  wird mit dem euklidischen Algorithmus wie folgt berechnet:
wird mit dem euklidischen Algorithmus wie folgt berechnet:

Der größte gemeinsame Teiler von
und
ist somit  .
.
Beschreibung durch Pseudocode
Im Folgenden wird der moderne Euklidische Algorithmus sowohl in einer
rekursiven als auch einer iterativen Variante beschrieben. Dabei sind
und
jeweils die beiden Zahlen, deren größter gemeinsamer Teiler berechnet werden
soll.
Rekursive Variante
EUCLID(a,b) 1 wenn b = 0 dann 2 Ergebnis = a 3 sonst 4 Ergebnis = EUCLID(b, Divisionsrest(a durch b)) // siehe Modulo-Funktion 5 //
Iterative Variante
EUCLID(a,b) 1 solange b ≠ 0 2 h
Programmierung
Das folgende Programm in der Programmiersprache C++ zeigt die Implementierung der rekursiven Variante und der iterativen Variante. Die zwei Varianten werden jeweils in einer Funktion mit den Parametern a und b implementiert. Bei der Ausführung des Programms wird die Hauptfunktion main verwendet, die die Eingabe der beiden Zahlen über die Konsole ermöglicht und dann das Ergebnis der beiden Varianten dort ausgibt.
#include <iostream>
using namespace std;
int gcdRecursive(int a, int b)
{
if (b == 0)
{
return a;
}
else
{
return gcdRecursive(b, a % b); // Rekursiver Aufruf der Methode
}
}
int gcdIterative(int a, int b)
{
if (a == 0)
{
return b;
}
while (b != 0)
{
int h = a % b;
a = b;
b = h;
}
return a;
}
// Hauptfunktion die das Programm ausführt
int main()
{
int a, b; // Deklaration der lokalen Variablen
cout << "Erste Zahl: "; // Ausgabe auf der Konsole
cin >> a; // Eingabe über die Konsole
cout << "Zweite Zahl: "; // Ausgabe auf der Konsole
cin >> b; // Eingabe über die Konsole
cout << "Größter gemeinsamer Teiler (rekursiv): " << gcdRecursive(a, b) << endl; // Aufruf der rekursiven Funktion
cout << "Größter gemeinsamer Teiler (iterativ): " << gcdIterative(a, b) << endl; // Aufruf der íterativen Funktion
}
Korrektheit des Algorithmus
In jedem Schritt des Algorithmus wird eine Division mit Rest ausgeführt:
 .
.
Die Division mit Rest hat die Eigenschaft
 .
.
Im letzten Schritt des Algorithmus,
 ,
,
ist  und deshalb gilt
und deshalb gilt
 .
.
Da im ersten Schritt  und
und  ist, ist
ist, ist
 .
.
Historische Entwicklung

Der euklidische Algorithmus ist der älteste bekannte nicht-triviale Algorithmus. Das Verfahren wurde von Euklid um 300 v. Chr. in seinem Werk Die Elemente beschrieben. In Buch VII (Proposition 1 und 2) formulierte er den Algorithmus für positive ganze Zahlen und in Buch X (Proposition 2 und 3) für positive reelle Zahlen. Die letztere Version ist ein geometrischer Algorithmus und Euklid nannte ihn „Wechselwegnahme“ (griech. ἀνθυφαίρεσις anthyphairesis). Er suchte ein größtes gemeinsames „Maß“ zweier Strecken: eine dritte Strecke, sodass die Länge der beiden ursprünglichen Strecken Vielfache der Länge der dritten Strecke sind.
Das Verfahren wurde wahrscheinlich nicht von Euklid erfunden, da er in den Elementen die Erkenntnisse früherer Mathematiker zusammenfasste. Der Mathematiker und Historiker Bartel Leendert van der Waerden vermutet, dass Buch VII ein schon von den Pythagoreern verwendetes Lehrbuch der Zahlentheorie ist. Hippasos von Metapont führte etwa 500 v. Chr. vermutlich seinen Beweis der Inkommensurabilität von gewissen Strecken und Diagonalen auf Grundlage des euklidischen Algorithmus durch, und auch Eudoxos von Knidos (um 375 v. Chr.) kannte wohl das Verfahren. Aristoteles (um 330 v. Chr.) wies auf dieses Verfahren in seinem Werk Topik (158b, 29–35) hin.
Jahrhunderte später wurde der euklidische Algorithmus voneinander unabhängig in Indien und China entdeckt, um damit hauptsächlich diophantische Gleichungen aus der Astronomie zu lösen und genaue Kalender zu erstellen. Im fünften Jahrhundert beschrieb der indische Mathematiker und Astronom Aryabhata den Algorithmus als „Pulverisator“, wahrscheinlich aufgrund seiner Effektivität beim Lösen diophantischer Gleichungen. Zwar hat schon der chinesische Mathematiker und Astronom Sun Zi einen Spezialfall des chinesischen Restsatzes beschrieben, die allgemeine Lösung wurde jedoch von Qin Jiushao 1247 in seinem Buch Shushu Jiuzhang (chinesisch 數書九章 / 数书九章 – „Mathematische Abhandlung in neun Kapiteln“) veröffentlicht. Im neuzeitlichen Europa wurde der euklidische Algorithmus erstmals wieder in der zweiten Auflage von Bachets Problèmes plaisants et délectables, qui se font par les nombres beschrieben. Der Algorithmus wurde in Europa zum Lösen diophantischer Gleichungen und zur Berechnung der Kettenbruchentwicklung verwendet. Nicholas Saunderson veröffentlichte den erweiterten euklidischen Algorithmus und schrieb ihn Roger Cotes zu als Methode zur effizienten Berechnung von Kettenbrüchen.
Im 19. Jahrhundert gab der euklidische Algorithmus den Anstoß zur Entwicklung neuer Zahlensysteme wie den gaußschen Zahlen und den Eisenstein-Zahlen. 1815 verwendete Carl Friedrich Gauß den euklidischen Algorithmus, um die eindeutige Faktorisierung der gaußschen Zahlen zu zeigen. Seine Arbeit wurde jedoch erst im Jahr 1832 veröffentlicht. Gauß erwähnte den Algorithmus zudem in seinem 1801 veröffentlichten Werk Disquisitiones Arithmeticae, allerdings nur als Methode zur Berechnung von Kettenbrüchen. Peter Gustav Lejeune Dirichlet scheint der Erste zu sein, der den euklidischen Algorithmus als Grundlage eines großen Teils der Zahlentheorie beschrieben hat. Er bemerkte, dass viele Ergebnisse der Zahlentheorie, wie beispielsweise die eindeutige Faktorisierung, auch für andere Zahlensysteme gelten, in denen der euklidische Algorithmus angewendet werden kann. Dirichlets Vorlesungen über Zahlentheorie wurden von Richard Dedekind herausgegeben und erweitert, der den euklidischen Algorithmus für das Studium algebraischer Zahlen nutzte, einer neuen allgemeineren Zahlenart. Dedekind war beispielsweise der Erste, der Pierre de Fermats Zwei-Quadrate-Satz mit der eindeutigen Faktorisierung der gaußschen Zahlen bewies. Dedekind führte das Konzept des euklidischen Rings ein, ein Zahlensystem, in dem eine verallgemeinerte Variante des euklidischen Algorithmus angewendet werden kann. In den letzten Jahrzehnten des 19. Jahrhunderts trat der euklidische Algorithmus allmählich hinter Dedekinds allgemeinere Theorie der Ideale zurück.
Jacques Charles François Sturm entwickelte 1829 die sturmschen Ketten zur Berechnung der Anzahl der Nullstellen eines Polynoms in einem vorgegebenen Intervall. Dabei wird eine Variante des euklidischen Algorithmus verwendet, um die einzelnen Glieder einer Kette zu bestimmen.
In der Vergangenheit gab es zahllose Versuche, den euklidischen Algorithmus auf mehr als zwei natürliche Zahlen zu verallgemeinern, beispielsweise um außer ihrem größten gemeinsamen Teiler auch optimale (etwa kleinstmögliche) Multiplikatoren zu finden, die in der Linearkombination mit den Zahlen diesen Teiler liefern. Der moderne Stand der Forschung hierzu wurde von Havas, Majewski und Matthews dargestellt.
Der euklidische Algorithmus war der erste Algorithmus zur Berechnung von Ganzzahlbeziehungen kommensurabler reeller Zahlen. In den vergangenen Jahren wurden weitere Algorithmen für diese Aufgabenstellung entwickelt, beispielsweise der Ferguson–Forcade-Algorithmus aus dem Jahr 1979 und verwandte Algorithmen, der LLL-Algorithmus, der HJLS-Algorithmus (nach den Autoren Håstad, Just, Lagarias und Schnorr) und der PSLQ-Algorithmus (nach partial sum of squares plus LQ matrix decomposition). Im Jahr 2001 wurde gezeigt, dass die von einigen Autoren berichtete Instabilität des HJLS-Algorithmus lediglich auf einer unzweckmäßigen Implementierung beruhte und dass dieser Algorithmus äquivalent zum PSLQ-Algorithmus ist. Enger an den eigentlichen euklidischen Algorithmus angelehnt sind seine mehrdimensionalen Verallgemeinerungen von George Szekeres (1970), Helaman Ferguson und Rodney Forcade (1981), von Rössner und Schnorr (1996) sowie der sehr allgemeine Ansatz von Lagarias (1994).
1969 entwickelten Cole und Davie das Zwei-Spieler-Spiel „Euklid“, das auf dem
euklidischen Algorithmus basiert.
Bei diesem Spiel gibt es eine optimale Strategie.
Die beiden Spieler beginnen mit zwei Stapeln von
und
Steinen. In jeder Runde nimmt ein Spieler -mal
so viele Steine vom größeren Stapel, wie der kleinere Stapel groß ist. Auf diese
Weise kann der nächste Spieler den größeren Stapel mit  Steinen auf
Steinen auf  Steine verkleinern, wobei
Steine verkleinern, wobei  die Größe des kleineren Stapels ist. Es gewinnt der Spieler, der einen Stapel
komplett abträgt.
die Größe des kleineren Stapels ist. Es gewinnt der Spieler, der einen Stapel
komplett abträgt.
Laufzeitanalyse
Mit dem euklidischen Algorithmus kann man den ggT mit verhältnismäßig geringem Aufwand (im Vergleich zur Berechnung der Primfaktorzerlegung der Zahlen a und b) berechnen. Bei der Laufzeitanalyse stellt sich heraus, dass der schlimmste Eingabefall zwei aufeinander folgende Fibonacci-Zahlen sind. Bei aufeinander folgenden Fibonacci-Zahlen ergibt sich als Rest immer die nächstkleinere Fibonacci-Zahl. Die Anzahl der benötigten Divisionen beträgt im schlimmsten Fall Θ(log(ab)), wobei log(ab) proportional zur Anzahl der Ziffern in der Eingabe ist (siehe Landau-Symbole).
Da die für die Division zweier Zahlen benötigte Zeit ihrerseits von der Anzahl der Ziffern der Zahlen abhängt, ergibt sich eine tatsächliche Laufzeit von O(log(ab)^3) bei naiver Ausführung der Division. Durch die vollständige Überführung der eigentlichen Berechnung in den Frequenzbereich mittels einer speziellen schnellen Fourier-Transformation, wie sie im Schönhage-Strassen-Algorithmus Verwendung findet, schneller Reziprokwertberechnung mit dem Newton-Verfahren (im Frequenzbereich) für die Division und anschließender Rücktransformation mittels inverser schneller Fourier-Transformation kommt man so zu einer theoretischen Untergrenze von Ω(n⋅log(n)), wobei n die maximale Anzahl an Ziffern von a und b ist.
Die von Schönhage entwickelte Variante des euklidischen Algorithmus konnte durch Parallelisierung auf einem Multi-Prozessor-System weiter beschleunigt werden
Für die Anzahl der Schritte gibt es asymptotische Abschätzungen, wobei die Porter-Konstante eine Rolle spielt.
Euklidischer Algorithmus und Kettenbruchzerlegung
Die Quotienten, die im euklidischen Algorithmus auftreten, sind genau die
Teilnenner, die in der Kettenbruchzerlegung
von  vorkommen. Hier für das obige Beispiel mit hervorgehobenen Ziffern:
vorkommen. Hier für das obige Beispiel mit hervorgehobenen Ziffern:
| 1071 | = 1 | × 1029 | + 42 |
| 1029 | = 24 | × 42 | + 21 |
| 42 | = 2 | × 21 | + 0 |
Hieraus lässt sich der Kettenbruch entwickeln:
![{\frac {1071}{1029}}=\mathbf {1} +{\frac {42}{1029}}=\mathbf {1} +{\frac {1}{\frac {1029}{42}}}=\mathbf {1} +{\frac {1}{\mathbf {24} +{\frac {21}{42}}}}=\mathbf {1} +{\frac {1}{\mathbf {24} +{\frac {1}{\mathbf {2} }}}}=[1;24,2]](/svg/96739934e5a848b28a53bb7d23954d92ac19fa38.svg) .
.
Dieses Verfahren lässt sich auch für jede beliebige reelle Zahl
anwenden. Ist
nicht rational, so endet der Algorithmus einfach nie. Die so gewonnene Folge an
Quotienten stellt dann die unendliche Kettenbruchzerlegung von
dar.
Andere Zahlensysteme
Wie oben beschrieben wird der euklidische Algorithmus zur Berechnung des größten gemeinsamen Teilers zweier natürlicher Zahlen verwendet. Der Algorithmus lässt sich jedoch auch auf reelle Zahlen und exotischere Zahlensysteme wie Polynome, quadratische Zahlen und die nicht-kommutativen Hurwitzquaternionen verallgemeinern. Im letzten Fall wird der euklidische Algorithmus dazu verwendet, die wichtige Eigenschaft einer eindeutigen Faktorisierung zu zeigen. Das heißt, dass eine solche Zahl eindeutig in irreduzible Elemente, der Verallgemeinerung von Primzahlen, zerlegt werden kann. Die eindeutige Faktorisierung ist grundlegend für viele Beweise der Zahlentheorie.
Rationale und reelle Zahlen
Wie schon von Euklid im Buch 10 seines Werks „Die Elemente“ beschrieben, kann
der euklidische Algorithmus auch auf reelle Zahlen angewandt werden. Das Ziel
des Algorithmus ist es dann, eine reelle Zahl  zu finden, sodass die beiden Zahlen
und
ganzzahlige Vielfache dieser Zahl sind. Diese Aufgabenstellung ist
gleichbedeutend mit der Suche nach einer Ganzzahlbeziehung zwischen den beiden
reellen Zahlen
und ,
also der Berechnung zweier ganzer Zahlen
zu finden, sodass die beiden Zahlen
und
ganzzahlige Vielfache dieser Zahl sind. Diese Aufgabenstellung ist
gleichbedeutend mit der Suche nach einer Ganzzahlbeziehung zwischen den beiden
reellen Zahlen
und ,
also der Berechnung zweier ganzer Zahlen  und
und  ,
für die
,
für die  gilt. Euklid verwendete diesen Algorithmus bei der Betrachtung der Inkommensurabilität
von Strecken.
gilt. Euklid verwendete diesen Algorithmus bei der Betrachtung der Inkommensurabilität
von Strecken.
Der euklidische Algorithmus für reelle Zahlen unterscheidet sich in zwei
Punkten von seinem Gegenstück für ganze Zahlen. Zum einen ist der Rest  eine reelle Zahl, obwohl die Quotienten
eine reelle Zahl, obwohl die Quotienten  weiterhin ganze Zahlen sind. Zum anderen endet der Algorithmus nicht immer nach
einer endlichen Anzahl von Schritten. Wenn er dies jedoch tut, dann ist der
Bruch
weiterhin ganze Zahlen sind. Zum anderen endet der Algorithmus nicht immer nach
einer endlichen Anzahl von Schritten. Wenn er dies jedoch tut, dann ist der
Bruch  eine rationale Zahl; es gibt also zwei ganze Zahlen
und
mit
eine rationale Zahl; es gibt also zwei ganze Zahlen
und
mit

und kann als Kettenbruch ![[q_{0};q_{1},q_{2},\ldots ,q_{N}]](/svg/a43006b695033c531ac1314a2fb7907c5d8a2307.svg) geschrieben werden. Wenn der Algorithmus nicht endet, dann ist der Bruch
eine irrationale
Zahl und mit dem unendlichen Kettenbruch
geschrieben werden. Wenn der Algorithmus nicht endet, dann ist der Bruch
eine irrationale
Zahl und mit dem unendlichen Kettenbruch ![[q_{0};q_{1},q_{2},\ldots ]](/svg/6b046c9fa13707be96080faee20a26e8524348e5.svg) identisch. Beispiele für unendliche Kettenbrüche sind die Goldene Zahl
identisch. Beispiele für unendliche Kettenbrüche sind die Goldene Zahl ![\Phi =[1;1,1,\ldots ]](/svg/5e511fa0fdfdaf2663caae47cbef9a4027b17c52.svg) und die Wurzel
aus 2
und die Wurzel
aus 2 ![{\sqrt {2}}=[1;2,2,\ldots ]](/svg/694d3684befcd13990e0066db1600c1b7f13c25f.svg) .
Im Allgemeinen ist es unwahrscheinlich, dass der Algorithmus anhält, da fast
alle Verhältnisse
zweier reeller Zahlen irrationale Zahlen sind.
.
Im Allgemeinen ist es unwahrscheinlich, dass der Algorithmus anhält, da fast
alle Verhältnisse
zweier reeller Zahlen irrationale Zahlen sind.
Polynome
Polynome
in einer Variablen über einem Körper bilden einen euklidischen Ring.
Die Polynomdivision
ist für diese Polynome also eine Division mit Rest und der euklidische
Algorithmus kann genauso wie bei den ganzen Zahlen durchgeführt werden. Die
Berechnung des größten gemeinsamen Teilers der Polynome  und
und  in
in ![\mathbb {R} [x]](/svg/453d1013f9dd290be70d5fe534e0d3311b0a7c6a.svg) gestaltet sich beispielsweise folgendermaßen:
gestaltet sich beispielsweise folgendermaßen:


Damit ist  (oder das dazu assoziierte
Polynom
(oder das dazu assoziierte
Polynom  )
ein größter gemeinsamer Teiler von
)
ein größter gemeinsamer Teiler von  und .
und .
Polynome mit Koeffizienten aus einem faktoriellen Ring
Wir halten einen faktoriellen Ring (d.h. einen Ring mit bis auf
Einheiten eindeutiger Primfaktorzerlegung)  fest und betrachten Polynome aus dem Polynomring
fest und betrachten Polynome aus dem Polynomring ![R[x]](/svg/0ce54622cb380383ab3a42441b056626ea0d2440.svg) ,
also Polynome in einer Variablen
mit Koeffizienten aus .
Im Spezialfall
,
also Polynome in einer Variablen
mit Koeffizienten aus .
Im Spezialfall ![R=k[y]](/svg/c7ee8f1a9bd26e0d12950273746df9c7ed90195a.svg) ,
wobei
,
wobei  ein Körper sei, erhalten wir so den Ring
ein Körper sei, erhalten wir so den Ring ![k[x,y]](/svg/e8462ca2b7942a5b5d38beed97662788b27b568a.svg) der Polynome in zwei Variablen über .
der Polynome in zwei Variablen über .
In
ist Division mit Rest nicht mehr allgemein durchführbar. Seien z.B.  und
und  in
in ![\mathbb {Z} [x]](/svg/0d4da3ac703cc7721ebba91a53f6752de7157124.svg) .
Polynomdivision in
.
Polynomdivision in ![\mathbb {Q} [x]](/svg/da33ddef34ad0c677b6eb7e042f574ee0e7553f7.svg) liefert den Quotienten
liefert den Quotienten  ,
der nicht in
liegt. Wir können allerdings eine Pseudodivision wie folgt definieren: Seien
und
Polynome aus
mit Grad
,
der nicht in
liegt. Wir können allerdings eine Pseudodivision wie folgt definieren: Seien
und
Polynome aus
mit Grad  bzw.
bzw.  ,
sei
,
sei  der Leitkoeffizient des Polynoms ,
und
der Leitkoeffizient des Polynoms ,
und  .
Dann gibt es Polynome
.
Dann gibt es Polynome ![q,r\in R[x]](/svg/f011eb064af39f2634ddc3eea7c95eda61c2a4af.svg) ,
so dass
,
so dass

wobei wieder
von geringerem Grad ist als .
Durch wiederholte Durchführung der Pseudodivision lässt sich der ggT von
und
bestimmen, allerdings ist das Verfahren in der Praxis ineffizient, da die
Faktoren  die Koeffizienten der Zwischenergebnisse exponentiell anwachsen lassen. Um das
zu vermeiden kann nach jedem Schritt der Inhalt
des Rests
entfernt werden, was allerdings wiederum ggT-Berechnungen in
erfordert. Effizienter lässt sich der ggT mit dem Subresultantenverfahren
berechnen.
die Koeffizienten der Zwischenergebnisse exponentiell anwachsen lassen. Um das
zu vermeiden kann nach jedem Schritt der Inhalt
des Rests
entfernt werden, was allerdings wiederum ggT-Berechnungen in
erfordert. Effizienter lässt sich der ggT mit dem Subresultantenverfahren
berechnen.
Varianten
Von Josef Stein stammt der nach ihm benannte steinsche Algorithmus, der ohne die aufwändigen Divisionen auskommt. Er verwendet nur noch Divisionen durch Zwei, die von einem Rechner sehr schnell durchzuführen sind. Aus diesem Grund wird dieser Algorithmus auch binärer euklidischer Algorithmus genannt. Der Performancevorteil auf realen Rechnern zeigt sich aber nur, wenn der Integertyp die Registerbreite des Prozessors nicht überschreitet.
Merkt man sich beim euklidischen Algorithmus die Quotienten  der Zwischenschritte, dann lässt sich damit eine Darstellung
der Zwischenschritte, dann lässt sich damit eine Darstellung

mit ganzen Zahlen
und
finden. Dies nennt man den erweiterten
euklidischen Algorithmus. Damit lassen sich die Inversen in Restklassenringen
berechnen.
Eine andere Erweiterung ist der Algorithmus, der hinter dem Quadratischen Reziprozitätsgesetz steckt. Mit diesem lässt sich das Jacobi-Symbol effizient berechnen.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 25.10. 2022