Kugeltensor
 durch einen Tensor
durch einen Tensor  .
. durch einen Kugeltensor
durch einen Kugeltensor  .
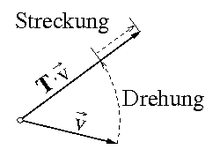
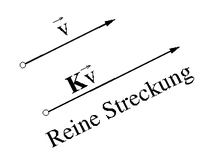
.Kugeltensoren, Axiatoren oder sphärische Tensoren sind in der Kontinuumsmechanik Tensoren, die proportional zum Einheitstensor zweiter Stufe sind. Tensoren zweiter Stufe werden hier als lineare Abbildungen von geometrischen Vektoren auf geometrische Vektoren benutzt, die im Allgemeinen dabei gedreht und gestreckt werden, siehe die obere Abbildung rechts. Kugeltensoren sind die speziellen Abbildungen, die eine reine, homogene Streckung in alle drei Raumrichtungen ohne Drehung bewirken wie im unteren Bild rechts. Der Kugel- oder sphärische Anteil eines Tensors ist der Kugeltensor, der dieselbe Spur wie der Tensor besitzt.
Kugeltensoren treten in der Kontinuumsmechanik bei allseitigem, hydrostatischem Druck oder bei in allen drei Raumrichtungen gleichförmiger Expansion oder Kompression eines Körpers auf. Sie werden daher zur Modellierung des Materialverhaltens unter diesen Bedingungen benutzt.
Definition
Kugeltensoren sind Tensoren zweiter Stufe ,
die das  fache des Einheitstensors
fache des Einheitstensors
 sind:
sind:
 .
.
Der Kugelanteil eines Tensors
wird mit einem hochgestellten "K" oder "sph" bezeichnet:
 .
.
Die Spur
"Sp" des Einheitstensors
ist gleich der Dimension des zugrunde gelegten Raumes, hier und im Folgenden
gleich drei.
Expansion und Kompression

Wie eingangs erwähnt treten Kugeltensoren bei in allen drei Raumrichtungen gleichförmiger Expansion oder Kompression eines Körpers auf, die wie folgt beschrieben werden kann. Sei

der Ortsvektor eines Partikels eines Körpers  in der undeformierten Ausgangslage. Die Zahlen
in der undeformierten Ausgangslage. Die Zahlen  heißen materielle Koordinaten des Partikels und sind auf die Standardbasis
heißen materielle Koordinaten des Partikels und sind auf die Standardbasis  des dreidimensionalen euklidischen
Vektorraums
des dreidimensionalen euklidischen
Vektorraums  bezogen. In der Momentankonfiguration hat das Partikel zur Zeit
bezogen. In der Momentankonfiguration hat das Partikel zur Zeit  die Position
die Position

mit räumlichen Koordinaten  nach der Deformation in Folge der Bewegung
nach der Deformation in Folge der Bewegung  .
Bei reiner Expansion oder Kompression ohne Rotation gibt es ein Zentrum
der Expansion
.
Bei reiner Expansion oder Kompression ohne Rotation gibt es ein Zentrum
der Expansion  und einen Streckfaktor
so, dass
und einen Streckfaktor
so, dass

für alle Partikel gilt, siehe Abbildung rechts. Bildung des Gradienten nach
den materiellen Koordinaten  liefert den Deformationsgradient
liefert den Deformationsgradient
![\mathbf{F}
:=\operatorname{GRAD}(\vec{x})
:=\sum_{i,j=1}^{3}\frac{\mathrm{d}x_{i}}{{\mathrm{d}X}_{j}}
\vec{e}_{i}\otimes \vec{e}_{j}
=\sum_{i,j=1}^{3}\frac{\mathrm{d}}{\mathrm{d}X_{j}}[\lambda (X_{i}-o_{i})]
\vec{e}_{i}\otimes \vec{e}_{j}
=\sum_{i,j=1}^{3}\lambda \delta_{ij}\vec{e}_{i}\otimes \vec{e}_{j}
=\lambda \mathbf{I}](/svg/472943bad2b72aa6da0bb0dcf47879de153fd7ad.svg) ,
,
der hier also ein Kugeltensor ist. Das Rechenzeichen  ist das dyadische
Produkt und
ist das dyadische
Produkt und  bezeichnet das Kronecker-Delta.
Die Determinante des
Deformationsgradienten ist das Volumenverhältnis vor und nach der Expansion:
bezeichnet das Kronecker-Delta.
Die Determinante des
Deformationsgradienten ist das Volumenverhältnis vor und nach der Expansion:
 .
.
Inkompressibilität
Für ein inkompressibles Material ist die im vorigen Abschnitt beschriebene volumenändernde Deformation unmöglich, denn Inkompressibilität zeichnet sich durch ein konstantes Volumenverhältnis von eins aus. Mathematisch wird dies durch die Nebenbedingung

an die Bewegungsfunktion
ausgedrückt. Eine solche Nebenbedingung wird mit einem Lagrangeschen
Multiplikator sichergestellt, der hier dem Druck  im Material entspricht. Die zugehörige Reaktionsspannung ist der Drucktensor
im Material entspricht. Die zugehörige Reaktionsspannung ist der Drucktensor
 ,
,
der ein Kugeltensor ist. Beispiele für diese Beschreibungsweise finden sich in der Hyperelastizität.
Ort im Eigenwertraum
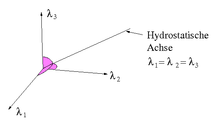
Als Vielfaches des Einheitstensors hat jeder Kugeltensor drei identische
Eigenwerte  die im Eigenwertraum auf der hydrostatischen Achse
die im Eigenwertraum auf der hydrostatischen Achse  liegen, siehe Abbildung rechts. Diese Achse wird, sofern nur symmetrische
Tensoren betrachtet werden, von den Kugeltensoren gebildet.
liegen, siehe Abbildung rechts. Diese Achse wird, sofern nur symmetrische
Tensoren betrachtet werden, von den Kugeltensoren gebildet.
Invarianten von Kugeltensoren
Die drei Hauptinvarianten eines Kugeltensors lauten
![{\begin{array}{rclcl}{\mathrm {I}}_{{1}}(\lambda {\mathbf {I}})&=&\operatorname {Sp}(\lambda {\mathbf {I}})&=&3\lambda \\{\mathrm {I}}_{{2}}(\lambda {\mathbf {I}})&=&{\frac {1}{2}}[\operatorname {Sp}{(\lambda {\mathbf {I}})}^{{2}}-\operatorname {Sp}(\lambda {\mathbf {I}}\cdot \lambda {\mathbf {I}})]&=&3\lambda ^{{2}}\\{\mathrm {I}}_{{3}}(\lambda {\mathbf {I}})&=&\operatorname {det}(\lambda {\mathbf {I}})&=&\lambda ^{{3}}\end{array}}](/svg/a64f81234efc7ab348e72a17f3bd6f4d6afaf54d.svg)
Der Betrag ist die Frobeniusnorm,
die sich mit dem Frobenius-Skalarprodukt
" "
zu
"
zu

berechnet.
Siehe auch


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 01.05. 2025