Airysche Spannungsfunktion
Die Airy’sche Spannungsfunktion – benannt nach George Biddell Airy – ist eine Funktion, aus der sich analytische Lösungen für Randwertaufgaben der linearen ebenen Elastostatik herleiten lassen. Die Airy’sche Spannungsfunktion basiert also auf der Annahme linearer Elastizität, kleiner Verschiebungen und statischer zeitunabhängiger Beanspruchungen in der Ebene. Das Auffinden einer Lösung der Randwertaufgabe verschiebt sich auf das Auffinden einer Spannungsfunktion, die den Randbedingungen genügt. Aus der Literatur sind viele Beispiele und Ansatzfunktionen bekannt, mit deren Hilfe die Konstruktion einer Lösung vereinfacht wird.
Die Spannungen in der Ebene berechnen sich aus Ableitungen der Spannungsfunktion, daher ihr Name. Über die lineare Elastizität folgen aus den Spannungen die Dehnungen aus denen wiederum die Verschiebungen in der Ebene berechnet werden. Der Erfolg dieses Vorgehens ist gesichert, wenn die Spannungsfunktion die sog. biharmonische Differentialgleichung, Scheibengleichung oder Bipotentialgleichung erfüllt, die eine partielle Differentialgleichung 4. Ordnung darstellt. Dann liegt Gleichgewicht vor und die berechneten Dehnungen sind kompatibel, was bedeutet, dass sich aus ihnen die Verschiebungen auch tatsächlich konstruieren lassen.
Für das Auffinden der Lösung müssen zunächst die Randbedingungen formuliert werden, die wegen der Beschränkung auf die Statik nicht von der Zeit abhängen dürfen. Es können sowohl Spannungsrandbedingungen (flächenverteilte Kräfte) als auch Verschiebungsrandbedingungen vorgegeben werden. Aus dem Fundus der aus der Literatur bekannten Lösungsfunktionen der Scheibengleichung wird ein Satz ausgewählt, der diese Randbedingungen erfüllt, und die Parameter der Funktionen an die Vorgaben angepasst.
Praktische Bedeutung hat die Airy’sche Spannungsfunktion in der Berechnung gerader oder ebener Konstruktionselemente (Stäbe, Balken, Scheiben) die im Maschinenbau und der Baustatik weit verbreitet sind. Hier sind die Verformungen oft klein oder müssen aus sicherheitstechnischen Gründen klein gehalten werden. Die verwendeten Materialien weisen oft bis zu gewissen Anwendungsgrenzen in guter Näherung ein linear elastisches Verhalten auf. Die in der technischen Mechanik bekannten Formeln für die Dehnung des geraden Stabes, der Biegung des geraden Balkens und der Scheibentheorie können auch mit der Airy’schen Spannungsfunktion dargestellt werden. Sie findet aber vor allem in anderen Problemen Anwendung wie z. B. der Biegung des stabförmigen Kreisrings, der Belastung der Scheibe mit Loch oder der Ebene mit Schlitz (Griffith Riss).
Die Beltrami Spannungsfunktionen sind die Verallgemeinerung der Airy’schen Spannungsfunktion auf drei Dimensionen.
Voraussetzungen
Die hier dargestellten Definitionen sind allgemein üblich und keine speziellen Annahmen für die Konstruktion der Spannungsfunktion. Betrachtet wird ein ebener, in der xy-Ebene eines kartesischen Koordinatensystems liegender Flächenträger.
Kinematik
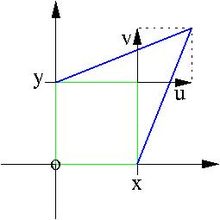
Die Verschiebungen eines jeden Punktes in der Ebene des Flächenträgers wird
durch zwei Funktionen beschrieben. Nach Voraussetzung liegt der Träger in der
xy-Ebene und dort ist es üblich die Verschiebung in x-Richtung mit  zu bezeichnen, die in y-Richtung mit
zu bezeichnen, die in y-Richtung mit  und die in z-Richtung mit
und die in z-Richtung mit  ,
siehe Bild. Die Funktionen
,
siehe Bild. Die Funktionen  und
sind von den Ortskoordinaten abhängig. Die Anwendung hier beschränkt sich auf
und
sind von den Ortskoordinaten abhängig. Die Anwendung hier beschränkt sich auf
 ,
,
 und
und  mit einer Konstanten
mit einer Konstanten  .
Andere Abhängigkeiten werden hier vernachlässigt. In der xy-Ebene sind also
(kleine) Verschiebungen erlaubt, senkrecht dazu nur zu
proportionale. Die Scheibenebene liegt bei
.
Andere Abhängigkeiten werden hier vernachlässigt. In der xy-Ebene sind also
(kleine) Verschiebungen erlaubt, senkrecht dazu nur zu
proportionale. Die Scheibenebene liegt bei  ,
so dass die Scheibe sich nicht durchbiegen oder insgesamt in z-Richtung
verschieben kann. Dies sind in der Scheibentheorie übliche Annahmen.
,
so dass die Scheibe sich nicht durchbiegen oder insgesamt in z-Richtung
verschieben kann. Dies sind in der Scheibentheorie übliche Annahmen.
Die Dehnungen beschreiben, wie stark sich die Verschiebungen von einem Ort zum anderen ändern: Orte, wo sich die Verschiebungen stark ändern, weisen große Dehnungen auf. Entsprechend liegt es nahe, die Dehnungen aus den Ableitungen nach dem Ort zu berechnen. Im geometrisch linearen Fall hier sind die einzig relevanten Dehnungskomponenten:
 .
.
Die Funktionen  und
sind die Normaldehnungen in x-, y- bzw. z-Richtung und
und
sind die Normaldehnungen in x-, y- bzw. z-Richtung und  ist die Schubverzerrung in der xy-Ebene. Andere (in drei Dimensionen mögliche)
Dehnungskomponenten verschwinden nach Voraussetzung.
ist die Schubverzerrung in der xy-Ebene. Andere (in drei Dimensionen mögliche)
Dehnungskomponenten verschwinden nach Voraussetzung.
Ebener Spannungs- und Dehnungszustand
Scheiben sind ebene Flächenträger, die nur in ihrer Ebene belastet werden. Stäbe und Balken sind in dieser Betrachtung als Sonderfall der schmalen und dünnen Scheibe enthalten. Wenn keine Belastungen senkrecht zur Ebene auftreten, herrscht in der Scheibe ein ebener Spannungszustand (ESZ). Flächenträger, die auch senkrecht zu ihrer Ebene belastet werden, werden als Platten bezeichnet. Ist diese Platte so dick, dass sie durch die senkrecht auf sie wirkende Belastung nicht merklich zusammengedrückt wird, herrscht in ihrer Ebene ein ebener Verzerrungszustand (EVZ). Beim ebenen Spannungszustand sind alle Spannungskomponenten, beim ebenen Verzerrungszustand alle Dehnungskomponenten senkrecht zur Ebene des Flächenträgers vernachlässigbar klein.
Lineare Elastizität
Bei einem linear elastischen Körper hängen die Spannungen  im ESZ nach folgender Matrizengleichung
von den Dehnungen
im ESZ nach folgender Matrizengleichung
von den Dehnungen  ab:
ab:

Der Parameter  ist der Elastizitätsmodul
und
ist der Elastizitätsmodul
und  die Querkontraktionszahl. Die
zz-Komponente der Dehnung ergibt sich zu
die Querkontraktionszahl. Die
zz-Komponente der Dehnung ergibt sich zu
 .
.
Auf der linken Seite der Gleichung steht eine Konstante aber auf der rechten Seite zumeist nicht. Deshalb wird der ESZ im Allgemeinen nur näherungsweise erfüllt werden. Im EVZ gilt

mit der zz-Komponente der Spannung

worin die Lamé-Konstante
 benutzt wurde.
benutzt wurde.
Hieraus können folgende Zusammenhänge abgelesen werden:

mit
| Größe | Ebener Verzerrungszustand (EVZ) | Ebener Spannungszustand (ESZ) |
|---|---|---|

|

|

|

|

|

|

|

|

|
Indem
durch  ausgetauscht wird, gehen die Formeln für den EVZ in die für den ESZ über.
ausgetauscht wird, gehen die Formeln für den EVZ in die für den ESZ über.
Kompatibilitätsbedingung
Sollen aus den Verzerrungen die Verschiebungen bestimmt werden, was hier der
Fall ist, müssen aus den drei Verzerrungen  und
nur zwei Verschiebungen
und
berechnet werden, die Verzerrungen können also nicht voneinander unabhängig
sein. Die Kompatibilitätsbedingung stellt sicher, dass aus den
Verzerrungen die Verschiebungen rekonstruierbar sind. Die Schubverzerrungen
werden nach x- und y abgeleitet und die Normaldehnungen eingesetzt
und
nur zwei Verschiebungen
und
berechnet werden, die Verzerrungen können also nicht voneinander unabhängig
sein. Die Kompatibilitätsbedingung stellt sicher, dass aus den
Verzerrungen die Verschiebungen rekonstruierbar sind. Die Schubverzerrungen
werden nach x- und y abgeleitet und die Normaldehnungen eingesetzt
 .
.
Dies ist die Kompatibilitätsbedingung für die Dehnungen im zweidimensionalen
Fall. Werden hier die Dehnungen durch die Spannungen ersetzt und die Gleichung
mit  multipliziert, ergibt sich:
multipliziert, ergibt sich:
 .
.
Gleichgewicht

Im Gleichgewicht heben sich die Kräfte an einem Scheibenelement in x- und y-Richtung genau auf:

siehe Bild. Division durch  liefert im Grenzwert
liefert im Grenzwert  und
und  die Gleichgewichtsbedingung in x- bzw. y-Richtung:
die Gleichgewichtsbedingung in x- bzw. y-Richtung:
 .
.
Differentiation der oberen Gleichung nach x, der unteren nach y, Addition der
resultierenden Gleichungen und Einsetzen der in Spannungen ausgedrückten
Kompatibilitätsbedingung führt wegen  auf
auf
![{\begin{array}{rcl}{\frac {{\mathrm {d}}^{2}\sigma _{{xx}}}{{\mathrm {d}}x^{2}}}+{\frac {{\mathrm {d}}^{2}\sigma _{{yy}}}{{\mathrm {d}}y^{2}}}+2{\frac {{\mathrm {d}}\sigma _{{xy}}}{{\mathrm {d}}x{\mathrm {d}}y}}&=&{\frac {{\mathrm {d}}^{2}\sigma _{{xx}}}{{\mathrm {d}}x^{2}}}+{\frac {{\mathrm {d}}^{2}\sigma _{{yy}}}{{\mathrm {d}}y^{2}}}+2\left[G\left(a{\frac {{\mathrm {d}}^{2}}{{\mathrm {d}}{y}^{2}}}-b{\frac {{\mathrm {d}}^{2}}{{\mathrm {d}}{x}^{2}}}\right)\sigma _{{xx}}+G\left(a{\frac {{\mathrm {d}}^{2}}{{\mathrm {d}}{x}^{2}}}-b{\frac {{\mathrm {d}}^{2}}{{\mathrm {d}}{y}^{2}}}\right)\sigma _{{yy}}\right]\\&=&(1-2Gb){\frac {{\mathrm {d}}^{2}\sigma _{{xx}}}{{\mathrm {d}}x^{2}}}+(1-2Gb){\frac {{\mathrm {d}}^{2}\sigma _{{yy}}}{{\mathrm {d}}y^{2}}}+2Ga{\frac {{\mathrm {d}}^{2}\sigma _{{xx}}}{{\mathrm {d}}{y}^{2}}}+2Ga{\frac {{\mathrm {d}}^{2}\sigma _{{yy}}}{{\mathrm {d}}{x}^{2}}}=0\\\rightarrow \left({\frac {{\mathrm {d}}^{2}}{{\mathrm {d}}{x}^{2}}}+{\frac {{\mathrm {d}}^{2}}{{\mathrm {d}}{y}^{2}}}\right)(\sigma _{{xx}}+\sigma _{{yy}})&=&\Delta (\sigma _{{xx}}+\sigma _{{yy}})=0\end{array}}](/svg/dd44d1b75d6b5584dfe7583aad41553652386316.svg)
mit dem Laplace-Operator
 .
.
Airy’sche Spannungsfunktion
Kartesische Koordinaten
Die Spannungskomponenten ergeben sich aus der Ableitung der Airy’schen
Spannungsfunktion  :
:
 .
.
Dann sind die Gleichgewichtsbedingungen identisch erfüllt und die Kompatibilitätsbedingung liefert, für homogenes, isotropes, linear elastisches Material

oder

Dies ist die Scheibengleichung oder Bipotentialgleichung. Jede Funktion, die diese Gleichung erfüllt, heißt biharmonisch. Vorwiegend werden zu ihrer Lösung Polynome, logarithmische Funktionen sowie Produkte von Exponential- und Winkelfunktionen benutzt, von denen hier eine Auswahl gegeben sei:

In diesen Termen können x und y, sin und cos sowie sinh und cosh vertauscht werden.
Orthotropie
für homogenes, orthotropes, linear elastisches Material ergibt sich die beschreibende Differentialgleichung zu:

Die Scheibengleichung bleibt gültig, wenn die Ebene mit Polarkoordinaten oder komplexen Zahlen parametrisiert wird.
Polarkoordinaten
Die Punkte in der xy-Ebene können alternativ auch in Polarkoordinaten angesprochen werden. Werden die obigen Formeln in Polarkoordinaten ausgedrückt, lautet der Laplace-Operator:
 .
.
Der Radius  ist der Abstand vom Ursprung und
ist der Abstand vom Ursprung und  der von der x-Achse gegen den Uhrzeigersinn messende Winkel zu einem Punkt in
der Ebene. Die Spannungen werden in Polarkoordinaten wie folgt aus der
Airy’schen Spannungsfunktion bestimmt:
der von der x-Achse gegen den Uhrzeigersinn messende Winkel zu einem Punkt in
der Ebene. Die Spannungen werden in Polarkoordinaten wie folgt aus der
Airy’schen Spannungsfunktion bestimmt:
 .
.
John Henry Michell fand, dass alle Funktionen, die die Scheibengleichung erfüllen, die folgende Form haben:
 .
.
Darstellung mit komplexen Funktionen
Aus der Funktionentheorie ist bekannt, dass jede biharmonische Funktion
mittels zweier analytischer komplexer Funktionen  und
und  der komplexen Variablen
der komplexen Variablen  mit
mit  dargestellt werden kann:
dargestellt werden kann:
 .
.
Die Funktion  gibt den Realteil
und
gibt den Realteil
und  ist der
konjugiert komplexe Wert.
ist der
konjugiert komplexe Wert.
Aus den komplexen Spannungsfunktionen ergeben sich die
Verschiebungskomponenten
und
in der x-y Ebene und die Spannungskomponenten aus den Kolosov’schen
Formeln:
 .
.
Darin ist  ,
,
 und im ESZ lautet der Parameter
und im ESZ lautet der Parameter  und im EVZ
und im EVZ  .
Auflösung nach den Spannungskomponenten liefert:
.
Auflösung nach den Spannungskomponenten liefert:
 .
.
Die Funktion  liefert den Imaginärteil
ihres Arguments.
liefert den Imaginärteil
ihres Arguments.
Berücksichtigung der Schwerkraft
Bei der Herleitung der Gleichgewichtsbedingungen oben wurde der Einfluss einer Schwerkraft vernachlässigt. Soll diese jedoch in Form eines Schwerkraftvektors

berücksichtigt werden, dann lauten die Gleichgewichtsbedingungen:
 .
.
Die Spannungskomponenten ergeben sich nun mit einer Funktion V aus dem modifizierten Ansatz:
 .
.
Aus den Gleichgewichtsbedingungen

ergibt sich dann

d.h.. die Schwerkraft ist der negative Gradient des Skalarfeldes V. Mit demselben Vorgehen wie in #Kartesische Koordinaten oben leitet sich mit

die Kompatibilitätsbedingung

mit dem Materialparameter

ab.
Beispiele
Dehnung des geraden Stabes

Ein gerader Stab der Länge  in x-Richtung und Querschnittsfläche
in x-Richtung und Querschnittsfläche  wird mit einer Kraft
wird mit einer Kraft  gemäß der flächenverteilten Last
gemäß der flächenverteilten Last  in x-Richtung lang gezogen. Damit lauten die Randbedingungen
in x-Richtung lang gezogen. Damit lauten die Randbedingungen
 .
.
Mit dem aus  motivierten Ansatz
motivierten Ansatz

ergibt sich die Normalspannung in y-Richtung wegen der Randbedingung bei
 als die zweite Ableitung nach x zu:
als die zweite Ableitung nach x zu:
 .
.
Die Normalspannung in x-Richtung ist die zweite Ableitung nach y

die konstant ist, weil sie bei  nicht von y abhängen soll. Zweimalige Integration über y liefert:
nicht von y abhängen soll. Zweimalige Integration über y liefert:
 .
.
Die Spannungsfunktion hat hier also die Form
 .
.
Damit ist  und
und  :
Die Lösung ist also zulässig.
:
Die Lösung ist also zulässig.
Aus den Dehnungen resultieren die Verschiebungen:
 .
.
Die Konstanten  werden an die Randbedingungen angepasst:
werden an die Randbedingungen angepasst:

Also ist endgültig
| Spannungen | 
|
|---|---|
| Dehnungen | 
|
| Verschiebungen | 

|
Die Querkontraktion ist
 .
.
Wegen  und
und  ist die Lösung für den ESZ im Einklang mit der in der technischen
Mechanik wohlbekannten Differentialgleichung für die Zug/Druck Beanspruchung
des geraden Stabes:
ist die Lösung für den ESZ im Einklang mit der in der technischen
Mechanik wohlbekannten Differentialgleichung für die Zug/Druck Beanspruchung
des geraden Stabes:
 .
.
Homogener Spannungszustand in der Ebene
Die komplexe Spannungsfunktion

entspricht einem homogenen (gleichförmigen) Spannungszustand in der Ebene. Aus ihr berechnen sich die Spannungskomponenten
 .
.
Die Hauptspannungen lauten damit
![\sigma _{{1,2}}={\frac {1}{2}}(\sigma _{{xx}}+\sigma _{{yy}})\pm {\sqrt {\left[{\frac {\sigma _{{xx}}-\sigma _{{yy}}}{2}}\right]^{2}+\tau _{{xy}}^{2}}}={\frac {\sigma }{2}}\pm {\frac {\sigma }{2}}](/svg/57532408b9522bcf3a2fec17b684f445e9d0fbbe.svg)
siehe Mohrscher Spannungskreis. Die Winkel, unter denen die Hauptspannungen auftreten, sind durch

gegeben, wirken also in Richtung  und senkrecht dazu.
und senkrecht dazu.
Der Griffith Riss

Mit Hilfe der Airy’schen Spannungsfunktion können die Spannungen in der Nähe
einer Rissspitze analysiert werden. In die Mitte des Risses wird wie im Bild
gezeigt ein kartesisches Koordinatensystem gelegt.
ist die halbe Risslänge. Das Innere des Einheitskreises in der komplexen  -Ebene wird mittels der Abbildung
-Ebene wird mittels der Abbildung

auf die komplexe Zahlenebene mit Schlitz abgebildet. Die Umkehrung dieser Abbildung

ist nicht eindeutig für alle Punkte, die auf den Rissflanken liegen, mit
Ausnahme der Rissspitzen. Die beiden Werte  und
und  sind reziprok zueinander (
sind reziprok zueinander (  ) und es ist diejenige Zahl zu nehmen, deren Betrag kleiner oder gleich als 1
ist. Auf den Rissflanken ist
) und es ist diejenige Zahl zu nehmen, deren Betrag kleiner oder gleich als 1
ist. Auf den Rissflanken ist  ,
,
 ,
,
 und
und  .
Die Rissspitzen selbst liegen bei
.
Die Rissspitzen selbst liegen bei  bzw.
bzw.  .
Für alle anderen Punkte der z-Ebene (
.
Für alle anderen Punkte der z-Ebene (  oder
oder  ) ist die Abbildung
) ist die Abbildung  eindeutig. Im Folgenden wird
statt
geschrieben.
eindeutig. Im Folgenden wird
statt
geschrieben.
Innendruck auf den Rissflanken

Beim Riss mit Normalbelastung  in y-Richtung an den Rissflanken (Innendruck) ergeben sich die komplexen
Spannungsfunktionen[1]
in y-Richtung an den Rissflanken (Innendruck) ergeben sich die komplexen
Spannungsfunktionen[1]

und die Spannungen
 .
.
Sie wachsen bei Annäherung an die Rissspitzen  über alle Grenzen: Hier liegt eine Singularität vor. Im Bild sind die
Spannungsspitzen nur bis zu einem gewissen maximalen Wert dargestellt, daher die
Plateaus.
über alle Grenzen: Hier liegt eine Singularität vor. Im Bild sind die
Spannungsspitzen nur bis zu einem gewissen maximalen Wert dargestellt, daher die
Plateaus.
Schubbelastung auf den Rissflanken

Beim Riss mit Schubbelastung  auf den Rissflanken ergeben sich die komplexen Spannungsfunktionen
auf den Rissflanken ergeben sich die komplexen Spannungsfunktionen

und die Spannungen
 .
.
Sie wachsen bei Annäherung an die Rissspitzen
über alle Grenzen: Hier liegt eine Singularität vor. Im Bild sind die
Spannungsspitzen nur bis zu einem gewissen maximalen Wert dargestellt, daher die
Plateaus.
Siehe auch
- Technische Mechanik
- Kontinuumsmechanik
- Geometrische Linearisierung
- Linear-elastische Bruchmechanik beschäftigt sich mit Rissen in elastischen Medien.
Fußnoten
- ↑
In H.G. Hahn 1976 sind für einen Griffith-Riss
unter einachsiger Zugbelastung
in einem Winkel
 zum Riss die Spannungsfunktionen mit
zum Riss die Spannungsfunktionen mit
 führt auf die hier dargestellten Funktionen.
führt auf die hier dargestellten Funktionen.

Literatur
- H. Parisch: Festkörper Kontinuumsmechanik. Teubner, 2003, ISBN 3-519-00434-8.
- H.G. Hahn: Bruchmechanik, Teubner Studienbücher: Mechanik, B.G. Teubner Stuttgart 1976.
- N.I. Musschelischwili: Einige Grundaufgaben zur mathematischen Elastizitätstheorie. C. Hanser, 1971.
- H. Grote, J. Feldhusen (Hrsg.): Dubbel Taschenbuch für den Maschinenbau. Springer, 2011. ISBN 978-3-642-17305-9.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 17.02. 2021