Konvexe Menge
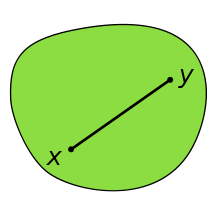
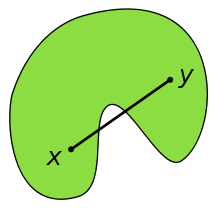
In der Mathematik heißt eine geometrische Figur oder allgemeiner eine Teilmenge eines euklidischen Raums konvex, wenn für je zwei beliebige Punkte, die zur Menge gehören, auch stets deren Verbindungsstrecke ganz in der Menge liegt. Dies garantiert, dass die Menge an keiner Stelle eine (konkave) Einbuchtung hat.
Geschichte und Anwendung
Die Theorie der konvexen Mengen begründete Hermann Minkowski in seinem Werk Geometrie der Zahlen, Leipzig 1910. Anwendung finden konvexe Mengen z.B. in der konvexen Optimierung oder der Computeranimation, wo konvexe Polytope in verschiedener Hinsicht einfacher zu handhaben sind als Nichtkonvexe.
Definition für Vektorräume
Eine Teilmenge  eines reellen oder komplexen Vektorraums
eines reellen oder komplexen Vektorraums  heißt konvex, wenn für alle
heißt konvex, wenn für alle  und für alle
und für alle  mit
mit  stets gilt:
stets gilt:

Diese Definition basiert auf der Parameterdarstellung
der Verbindungsstrecke zwischen  und
und  :
:

Tatsächlich schließt obige Definition auch Objekte mit geradlinigen Rändern wie Quadrate mit ein, die man umgangssprachlich nicht unbedingt als konvex bezeichnen würde.
Beispiele
- Jeder Vektorraum, der
 enthält, ist konvex, ebenso Halbebenen
und Halbräume.
enthält, ist konvex, ebenso Halbebenen
und Halbräume. - Beispiel-Teilmengen des anschaulichen euklidischen
Raumes:
- Die leere Menge und jede einelementige Menge sind konvex.
- Endliche Mengen sind genau dann konvex, wenn sie höchstens ein Element enthalten.
- Strecken und Geraden sind konvexe Mengen.
- Jede Dreiecksfläche und alle einfachen regelmäßigen Polygonflächen sind konvex.
- Kreisscheiben und Kugeln sind konvex, sogar streng konvex.
- Unter den Vierecken sind z.B. die Parallelogramme konvex, während es Trapeze und Drachenvierecke gibt, die nichtkonvex sind, wie das verschränkte Trapez oder das Pfeilviereck.
- Würfel, Platonische Körper und Spate sind konvex.
- Die Teilmenge die über- bzw. unterhalb des Graphen einer konvexen bzw. konkaven Funktion liegt, ist konvex.
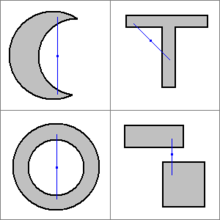
- Ein Torus ist nicht konvex.
- Der topologische Rand einer konvexen Menge ist im Allgemeinen nichtkonvex.
Eigenschaften
- Jede konvexe Menge ist sternförmig, derart, dass jeder Punkt als Sternzentrum gewählt werden kann. Insbesondere ist jede nichtleere konvexe Teilmenge eines reellen oder komplexen Vektorraums zusammenhängend und auf einen Punkt kontrahierbar, kann also keinerlei Löcher haben.
- Der Durchschnitt beliebig (auch unendlich) vieler konvexer Mengen ist konvex. Somit bilden die konvexen Teilmengen eines Vektorraumes ein Hüllensystem. Insbesondere gibt es zu jeder Teilmenge die davon erzeugte konvexe Menge, die sogenannte konvexe Hülle dieser Menge. Das ist nichts anderes als der Durchschnitt aller konvexen Mengen, die die vorgegebene Teilmenge umfassen.
- Die Vereinigung konvexer Mengen ist im Allgemeinen nicht konvex. Aber die Vereinigung einer aufsteigenden Kette konvexer Mengen ist wieder konvex.
- In lokalkonvexen
Räumen ist eine kompakte,
konvexe Menge
der Abschluss der Konvexkombinationen
ihrer Extremalpunkte
(Satz
von Krein-Milman). Dabei ist ein Extremalpunkt ein Punkt, der nicht
zwischen zwei Punkten aus
liegt. In endlichdimensionalen Räumen kann man sogar auf die Abschlussbildung
verzichten, denn nach dem Satz von
Carathéodory ist jeder Punkt einer kompakten, konvexen Teilmenge eines
n-dimensionalen Raums eine Konvexkombination von höchstens n+1 Extremalpunkten
dieser Menge.
Stabilität unter Operationen
Die Konvexität einer Menge ist stabil unter gewissen Operationen. Beispiele dafür sind:
- Bilder und Urbilder konvexer Mengen unter einer affinen Funktion
 mit
mit  und
und  sind wieder konvex. Dies enthält als Spezialfall die Translation um den Vektor
(Setze
sind wieder konvex. Dies enthält als Spezialfall die Translation um den Vektor
(Setze  die Einheitsmatrix) und die Skalierung um den Faktor
(Setze
die Einheitsmatrix) und die Skalierung um den Faktor
(Setze  ).
). - Die Minkowski-Summe
zweier konvexer Mengen
 ist wieder konvex.
ist wieder konvex. - Das kartesische
Produkt
 zweier konvexer Mengen ist wieder konvex.
zweier konvexer Mengen ist wieder konvex. - Jede Projektion
 einer konvexen Menge auf eine Koordinatenachse ist wieder konvex.
einer konvexen Menge auf eine Koordinatenachse ist wieder konvex. - Ist für jedes
 der Term
der Term  ,
so ist das Bild der konvexen Menge
,
so ist das Bild der konvexen Menge  unter der Funktion
unter der Funktion
-
- wieder konvex. Analog ist das Urbild einer konvexen Menge unter dieser Funktion wieder konvex.

Spezialfälle
Konvexe Mengen können auf verschiedene Weisen noch weiter eingeschränkt werden:
- Eine Menge
heißt streng konvex, wenn die offene
Verbindungsstrecke zweier beliebiger Punkte der Menge vollständig im Inneren der Menge
liegt.
Anschaulich besitzen streng konvexe Mengen keine geradlinigen
Berandungsteile.
- Eine Menge
heißt glatt konvex, wenn jeder Randpunkt der Menge eine eindeutige Stützhyperebene
besitzt.
Anschaulich besitzen glatte konvexe Mengen keine Ecken oder Kanten.
Normierte Räume
Konvexitätsbedingungen
In normierten
Räumen  ,
das heißt in Vektorräumen
mit einer Norm
,
das heißt in Vektorräumen
mit einer Norm
 ,
die jedem Vektor
,
die jedem Vektor  seine Länge
seine Länge  zuordnet, kann man mittels der Norm konvexe Mengen konstruieren. Die für die
Theorie der normierten Räume wichtigste konvexe Menge ist die Einheitskugel
zuordnet, kann man mittels der Norm konvexe Mengen konstruieren. Die für die
Theorie der normierten Räume wichtigste konvexe Menge ist die Einheitskugel  .
.
Gewisse Konvexitätsbedingungen, die man an die Einheitskugel eines normierten Raums stellen kann und die die Konvexität der Einheitskugel verschärfen, definieren Raumklassen normierter Räume. Das führt zu Begriffsbildungen wie zum Beispiel strikt konvexer, gleichmäßig konvexer oder glatter Räume.
Normale Struktur
Ein Punkt  einer beschränkten, konvexen Mengen
einer beschränkten, konvexen Mengen  heißt diametral für M, wenn
heißt diametral für M, wenn  gleich dem Durchmesser von
ist. In der Einheitskugel sind genau die Randpunkte, das heißt die Vektoren der
Länge 1, diametral. Für eine Strecke in einem normierten Raum sind genau die
Endpunkte dieser Strecke diametral. In diesen beiden Beispielen gibt es auch
stets nicht-diametrale Punkte. Das betrachtet man als eine "normale" Eigenschaft
und definiert:
gleich dem Durchmesser von
ist. In der Einheitskugel sind genau die Randpunkte, das heißt die Vektoren der
Länge 1, diametral. Für eine Strecke in einem normierten Raum sind genau die
Endpunkte dieser Strecke diametral. In diesen beiden Beispielen gibt es auch
stets nicht-diametrale Punkte. Das betrachtet man als eine "normale" Eigenschaft
und definiert:
Eine beschränkte, konvexe Menge hat normale Struktur, wenn jede darin
enthaltene abgeschlossene und konvexe Teilmenge
mit mindestens zwei Punkten nicht-diametrale Punkte bzgl.
enthält.
Man kann zeigen, dass jede kompakte, konvexe Menge in einem normierten Raum normale Struktur hat. Da beschränkte, abgeschlossene Mengen in endlichdimensionalen Räumen nach dem Satz von Heine-Borel kompakt sind, haben also alle beschränkten, konvexen Mengen in endlichdimensionalen Räumen normale Struktur. Das Auftreten beschränkter, konvexer Mengen ohne normale Struktur ist daher ein rein unendlichdimensionales Phänomen.
Verallgemeinerungen
Allgemein genügen für die sinnvolle Definition von Konvexität schon erheblich
schwächere Voraussetzungen an die Geometrie, die auf
gilt. Man braucht aus Hilberts
Axiomensystem der euklidischen Geometrie lediglich die Axiome der
Verknüpfung und die der Anordnung. Die Konvexität hängt insbesondere von der
Definition einer geraden Verbindungsstrecke ab. So ist die Halbebene, die durch
 definiert wird, konvex in der euklidischen Ebene,
aber nichtkonvex in der Moulton-Ebene:
Beispielsweise läuft die „Gerade“ zwischen
definiert wird, konvex in der euklidischen Ebene,
aber nichtkonvex in der Moulton-Ebene:
Beispielsweise läuft die „Gerade“ zwischen  und
und  über den (nicht in der Menge enthaltenen) Punkt
über den (nicht in der Menge enthaltenen) Punkt  .
Siehe auch kollinear.
.
Siehe auch kollinear.
Je nach mathematischem Kontext werden unterschiedliche Verallgemeinerungen benutzt, die auch teilweise nicht kohärent sind.
Konvexitätsraum
Folgende Axiomatik verallgemeinert die grundlegenden Eigenschaften konvexer Mengen auf einem Niveau, das vergleichbar ist mit dem der Topologie.
Eine Menge  zusammen mit einer Menge
von Teilmengen
zusammen mit einer Menge
von Teilmengen  wird Konvexitätsraum genannt, wenn für
wird Konvexitätsraum genannt, wenn für  Folgendes gilt:
Folgendes gilt:
- die leere
Menge und
selbst liegen in
- die Schnittmenge
beliebig vieler Mengen aus
liegt wieder in
- Falls eine Teilmenge
 total
geordnet ist bezüglich
Inklusion, so liegt die Vereinigung aller
Mengen aus
in .
total
geordnet ist bezüglich
Inklusion, so liegt die Vereinigung aller
Mengen aus
in .
Dann werden die Mengen aus
die konvexen Mengen von
genannt.
Metrisch konvexer Raum
Ein metrischer
Raum  wird metrisch konvex genannt, wenn zu je zwei verschiedenen
Punkten
wird metrisch konvex genannt, wenn zu je zwei verschiedenen
Punkten  stets ein dritter Punkt
stets ein dritter Punkt  derart existiert, dass in der Dreiecksungleichung
sogar Gleichheit gilt:
derart existiert, dass in der Dreiecksungleichung
sogar Gleichheit gilt:
 .
.
Von einem Punkt ,
welcher dieser Bedingung genügt, sagt man dann:
 liegt zwischen
und
liegt zwischen
und  .
.
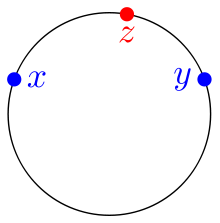
Hier gilt allerdings nicht mehr, dass der Schnitt von metrisch konvexen
Mengen wieder metrisch konvex wäre. So ist die Kreislinie mit der Metrik der Bogenlänge
metrisch konvex, zwei abgeschlossenen Halbkreise,
die bis auf ihre beiden Endpunkte  disjunkt
sind, sind auch metrisch konvexe (Teil)mengen, ihr zweielementiger Schnitt
disjunkt
sind, sind auch metrisch konvexe (Teil)mengen, ihr zweielementiger Schnitt  aber nicht.
aber nicht.
Das grundlegende Resultat über metrisch konvexe Räume ist der Verbindbarkeitssatz von Menger.
Geodätisch konvexe Mannigfaltigkeiten
Semi-Riemannsche
Mannigfaltigkeiten  haben eine innewohnende Metrik, die die Geodäten
der Mannigfaltigkeit festlegt. Wenn jedes Paar von Punkten in einer Umgebung
durch eine einzige Geodäte der Mannigfaltigkeit verbunden werden kann, die
vollständig in dieser Umgebung liegt, nennt man diese Umgebung einfach konvex.
haben eine innewohnende Metrik, die die Geodäten
der Mannigfaltigkeit festlegt. Wenn jedes Paar von Punkten in einer Umgebung
durch eine einzige Geodäte der Mannigfaltigkeit verbunden werden kann, die
vollständig in dieser Umgebung liegt, nennt man diese Umgebung einfach konvex.
Eine Untermannigfaltigkeit  einer riemannschen Mannigfaltigkeit
heißt geodätisch konvex, wenn sich je zwei beliebige Punkten
einer riemannschen Mannigfaltigkeit
heißt geodätisch konvex, wenn sich je zwei beliebige Punkten  durch eine Kurve in
durch eine Kurve in  verbinden lassen, die eine in
global längenminimierende Geodäte ist.
verbinden lassen, die eine in
global längenminimierende Geodäte ist.
Beispiele und Unterschiede
- Die rationalen
Zahlen mit dem üblichen Abstand bilden eine metrisch konvexe Teilmenge von
,
die nicht konvex ist.
- Gleiches gilt für
 ,
was als riemannsche Mannigfaltigkeit auch nicht geodätisch konvex ist.
,
was als riemannsche Mannigfaltigkeit auch nicht geodätisch konvex ist. - Eine konvexe Teilmenge des euklidischen Raumes ist stets auch metrisch konvex, bezüglich der von der Norm induzierten Metrik. Für abgeschlossene Teilmengen gilt auch die Umkehrung.
Krümmung von Kurven
Im Zweidimensionalen
kann die Krümmung einer stetig
differenzierbaren Kurve
in einem Punkt  in Relation zum Betrachter untersucht werden:
in Relation zum Betrachter untersucht werden:
- Liegen die benachbarten
Punkte von
in der gleichen Tangential-Halbebene
wie der Betrachter, so ist sie dort für ihn konkav gekrümmt.
- Existiert eine Umgebung um ,
so dass alle Punkte daraus in der anderen Tangential-Halbebene liegen, so ist
die Kurve in
für den Betrachter konvex gekrümmt.
Ecken werden konvex genannt, wenn alle Innenwinkel höchstens 180° betragen.
Analog kann in höheren Dimensionen die Krümmung von Hyperebenen untersucht werden, wozu das Objekt aber orientierbar sein muss.
Klassische Resultate über konvexe Mengen (Auswahl)
Siehe auch
Literatur
- Kurt Leichtweiß: Konvexe Mengen. Springer-Verlag, Berlin [u.a.] 1980, ISBN 3-540-09071-1.
- Jürg T. Marti: Konvexe Analysis. Birkhäuser, Basel (u.a.) 1977, ISBN 3-7643-0839-7.
- Frederick A. Valentine: Konvexe Mengen (= BI-Hochschultaschenbücher. 402/402a). Bibliographisches Institut, Mannheim 1968.


© biancahoegel.de
Datum der letzten Änderung: Jena, den: 15.09. 2022